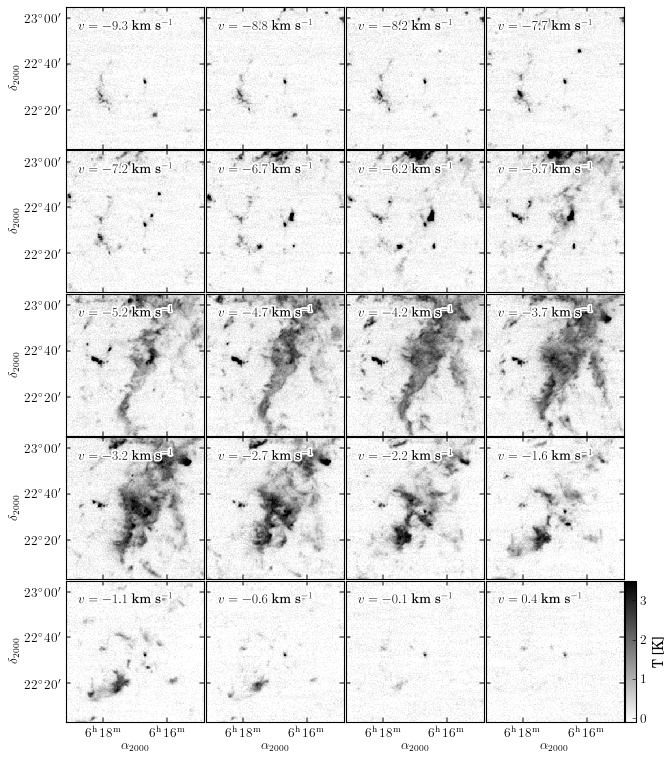
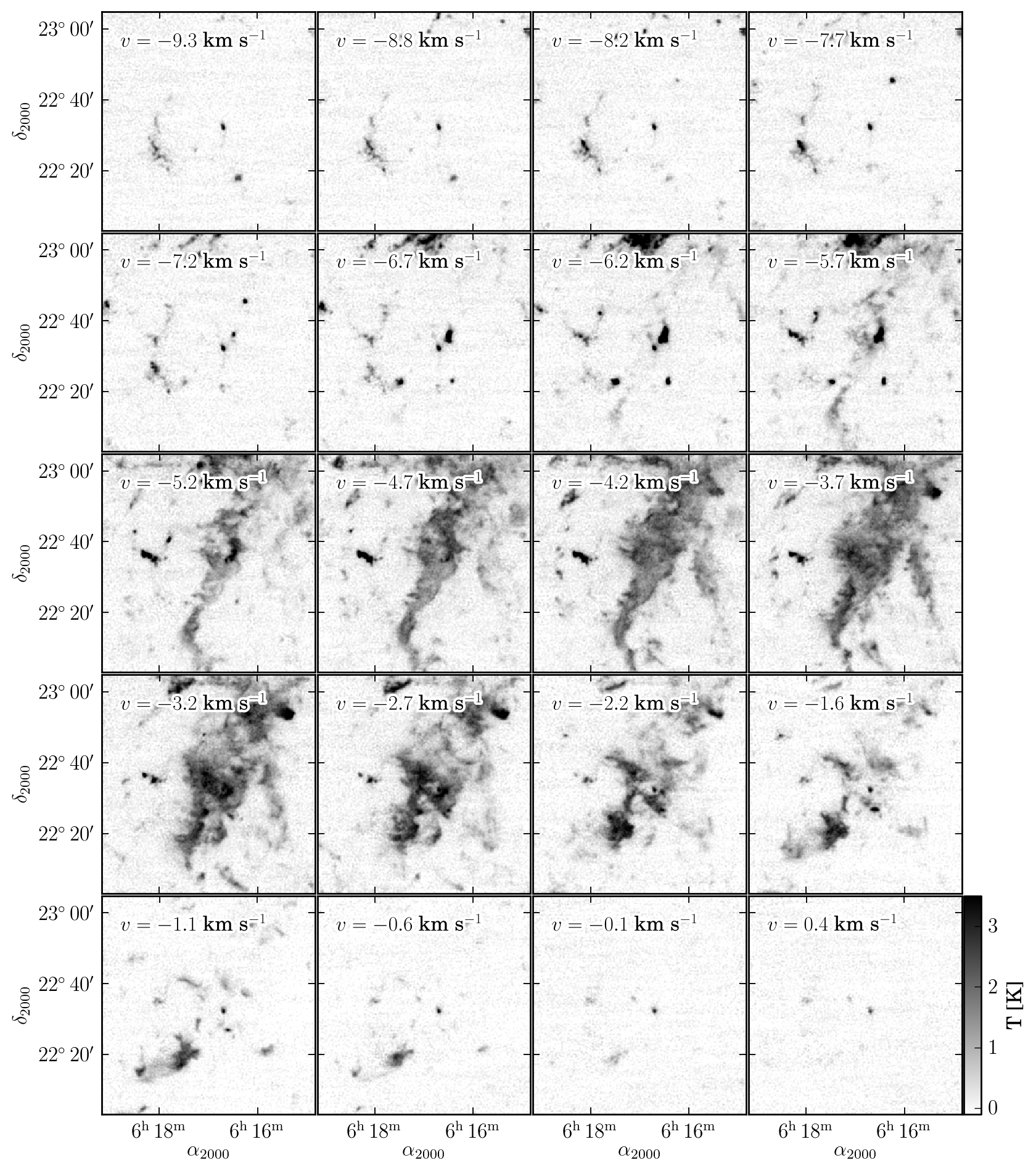
IC443 CO Channel Maps¶
- requires svn version of matplotlib or future release (>0.99.1)
- data file currently not available
import matplotlib.pyplot as plt
import pywcsgrid2
import pywcs
import mpl_toolkits.axes_grid1.axes_grid as axes_grid
#from mpl_toolkits.axes_grid.colorbar import colorbar
from mpl_toolkits.axes_grid1.inset_locator import inset_axes
import pyfits
class Velo(object):
def __init__(self, header):
wcs = pywcs.WCS(header)
self.wcs_vel = wcs.sub([3])
def to_vel(self, p):
v = self.wcs_vel.wcs_pix2sky([[p]], 0)
return v[0][0]
def setup_axes(fig, header):
gh = pywcsgrid2.GridHelper(wcs=header)
gh.locator_params(nbins=3)
g = axes_grid.ImageGrid(fig, 111,
nrows_ncols=(5, 4),
ngrids=None,
direction='row',
axes_pad=0.02, add_all=True,
share_all=True, aspect=True,
label_mode='L', cbar_mode=None,
axes_class=(pywcsgrid2.Axes, dict(grid_helper=gh)))
# make colorbar
ax = g[-1]
cax = inset_axes(ax,
width="8%", # width = 10% of parent_bbox width
height="100%", # height : 50%
loc=3,
bbox_to_anchor=(1.01, 0, 1, 1),
bbox_transform=ax.transAxes,
borderpad=0.
)
return g, cax
fits_cube = pyfits.open("ic443_co.ambient.fits")
header = fits_cube[0].header
vel = Velo(header)
fig = plt.figure(1, figsize=(9, 12), dpi=70)
g, cax = setup_axes(fig, header)
# draw images
i = 0
dxy = 3
nxy = 5 * 4
cmap = plt.cm.gray_r
import matplotlib.colors as mcolors
norm = mcolors.Normalize()
images = []
start_channel = i*nxy+dxy
for i, ax in enumerate(g):
channel_number = start_channel + i
channel = fits_cube[0].data[channel_number]
im = ax.imshow(channel, origin="lower", norm=norm, cmap=cmap)
images.append(im)
# label with velocities
use_path_effect = True
try:
from matplotlib.patheffects import withStroke
except ImportError:
use_path_effect = False
for i, ax in enumerate(g):
channel_number = start_channel + i
v = vel.to_vel(channel_number) / 1.e3
t = ax.add_inner_title(r"$v=%4.1f$ km s$^{-1}$" % (v), loc=2, frameon=False)
if use_path_effect:
t.txt._text.set_path_effects([withStroke(foreground="w",
linewidth=3)])
# make colorbar
cb = plt.colorbar(im, cax=cax)
cb.set_label("T [K]")
cb.set_ticks([0, 1, 2, 3])
# adjust norm
norm.vmin = -0.1
norm.vmax = 3.5
for im in images:
im.changed()
plt.show()
if 0:
plt.savefig("co_channel_maps.eps", dpi=70, bbox_inches="tight")
[source code, hires.png, pdf]
{kind=link}